近日,5822yh银河国际网页版封伟教授和王玲教授团队开发了一种仿生水黾光驱动水上行走软体机器人,将光响应液晶聚合物(LCN)薄膜作为“腿”为其提供驱动力,而具有微纳分级结构的超疏水表面为其提供支持力使其能够漂浮在水面上。作者首先设计并制备了可紫外光聚合的超小金纳米棒单体(MiniGNRs nanomonomer),将超小金纳米棒原位交联到LCN中获得超小金纳米棒复合液晶薄膜(MiniGNRs-LCN)。在近红外光(NIR)照射下,由于MiniGNRs优异的光热效应,MiniGNRs-LCN薄膜迅速发生弯曲形变,进而带动末端的超疏水片对水产生向后的推力,在反作用力下,软体机器人朝着相反的方向运动,通过光操控可以实现水上持续行走。利用MiniGNRs可调的波长选择性,作者制备的三“腿”软体机器人能够在不同波长的光照下,分别朝着三个方向行进,并进一步将它应用于物体输送。
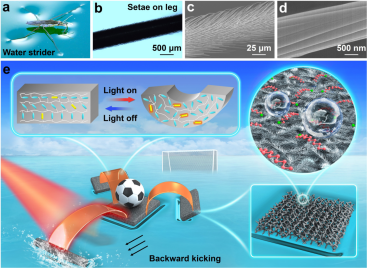
图1.自然界中的水黾及仿生水黾光驱动水上行走软体机器人
为了实现MiniGNRs在LCN中的均匀分散,研究人员依次通过包覆介孔二氧化硅、氨基功能化和有机小分子6OBA的共价键合,设计并制备了一种可聚合的MiniGNRs纳米单体(如图2)。之后通过MiniGNRs纳米单体与液晶单体的原位自由基聚合制备了一个光响应的MiniGNRs-LCN复合薄膜(如图3)。薄膜内部具有展曲取向,在NIR照射下,光热效应引发液晶基元的有序度降低,使薄膜平行取向一侧收缩,垂直取向一侧膨胀,进而实现了快速可逆的弯曲形变。当光强为300 mW cm-2时,薄膜表面温度在2.5 s内可达74 ℃,弯曲角度可达116°。
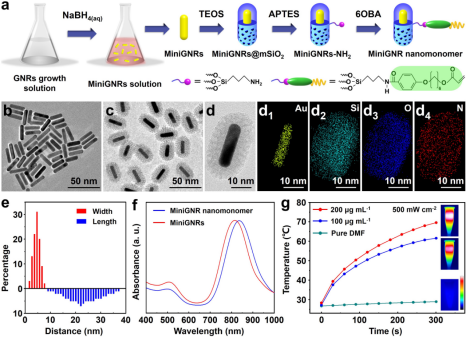
图2.MiniGNRs纳米单体的制备和表征
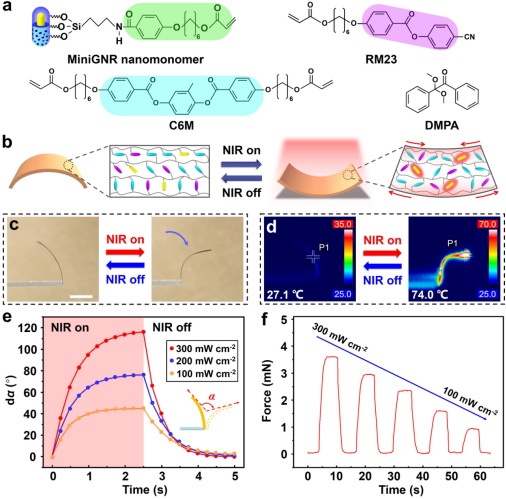
图3.MiniGNRs-LCN复合薄膜的制备和驱动性能
光驱动MiniGNRs-LCN复合薄膜的快速弯曲形变可为器件提供驱动力。此外,为使器件具有水上漂浮能力,研究人员以泡沫铜为基底制备了具有微纳分级结构的超疏水表面,并将其与MiniGNRs-LCN复合薄膜组装到一起,制备了一个仿生水黾的水上行走软体机器人(如图4)。在NIR照射下,薄膜迅速发生向下的弯曲,同时向后产生一个瞬时的推力,进而驱动器件向前运动。关闭NIR后,器件逐渐停止运动,通过周期性开关NIR,能够实现器件持续的水上行走过程。
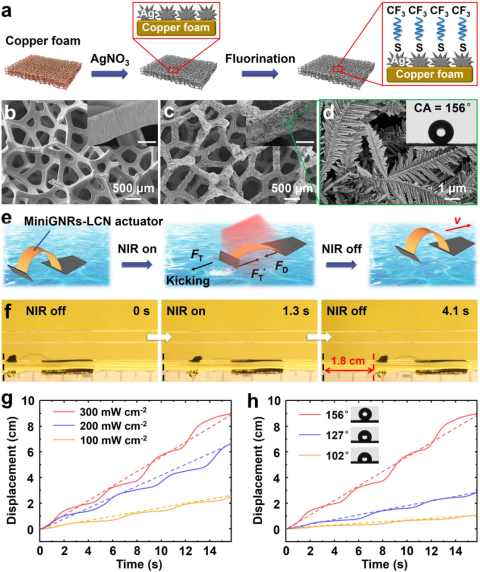
图4.红外光驱动单“腿”软体机器人的单向水上行走
作者进一步尝试实现器件的可控多方向水上行走过程。首先通过调控MiniGNRs的尺寸,合成了三种吸收峰分别位于544、664和836 nm的MiniGNRs纳米单体,它们能够分别响应520 nm绿光、655 nm红光以及808 nm的NIR,并进一步通过自由基聚合将它们分别原位交联到LCN中。在不同波长的光照下,只有与其波长相匹配的MiniGNRs-LCN薄膜才会发生弯曲形变,证明了掺杂不同MiniGNRs的LCN薄膜具有选择性光响应性(如图5)。基于此,研究人员最后制备了一个三“腿”水上行走软体机器人。在不同波长的光照下,器件能够分别朝着三个不同方向运动,并将其应用于定向的物体运输。
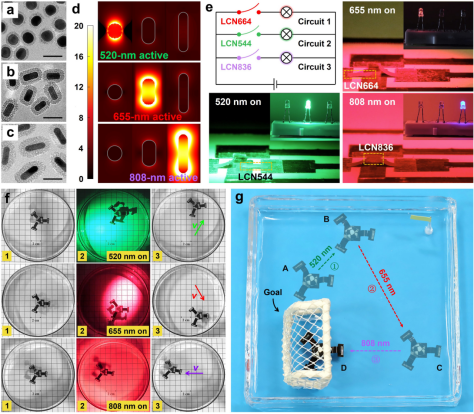
图5.多波长光照下三“腿”软体机器人的多向水上行走
研究人员通过将原位交联MiniGNRs的液晶复合薄膜与具有微纳分级复合结构的超疏水材料相结合,制备一种新型的仿生水黾的光驱动水上行走软体机器人。在NIR照射下,基于MiniGNRs-LCN复合薄膜光致形变力的水平动量传递,软体机器人能够在水面上快速行走,最快速度可达5.7 mm s-1。利用MiniGNRs可调的波长响应性,实现了软体机器人在多重光照射下的水上多方向行走,并将其应用于物体运输。该工作为具有复杂时空驱动的水栖软体机器人的设计提供了新的思路,在环境监测、海洋工业和未来海洋等领域具有潜在的应用价值。相关成果以“Bioinspired light-fueled water-walking soft robots based on liquid crystal network actuators with polymerizable miniaturized gold nanorods”为题发表在《Nano Today》上。论文第一作者是5822yh银河国际网页版博士生杨潇,5822yh银河国际网页版王玲教授和封伟教授为本文通讯作者。本工作得到了国家自然科学基金等项目的资助。
论文链接:https://doi.org/10.1016/j.nantod.2022.101419